Calliope Bot
Diese Anleitung beschreibt ein ferngesteuertes Fahrzeug mit dem Calliope. Der Antrieb des CalliBot erfolgt über zwei Getriebe-Motore, als Spannungversorgung dient eine 9V-Batterie und 2x1,5V Batterien für den Calliope. Das Träger-Element wird aus einer 4mm Sperrholzplatte gelasert. Als Fernbedienung dient ein zweiter Calliope. Optional kann der CalliBot mit einer Linienerkennung erweitert werden.
Die Grundplatte mit den Motoren, Batteriehalter und der H-Brücke kann auch für einen ESP32 oder Raspberry PI verwendet werden.
Stückliste
Materialaufwand für dieses Projekt:
- 1 x Sperrholzplatte DINA4 4mm
- 2 x Calliope
- 8 x Platinenhalter (3D-Druck)
- 2 x Getriebemotore mit Räder
- 1 x Dual-H-Brücke-DC-Motorantrieb L298N
- 1 x 9V-Batterie mit Batteriehater
- 4 x M3x30 Senkkopfschrauben
- 4 x M3 Muttern
- 5 x Kabelbinder 200mm
Aufbau und Montage
Der Aufbau und die Montage des CalliBot ist in mehrere Schritte unterteilt.
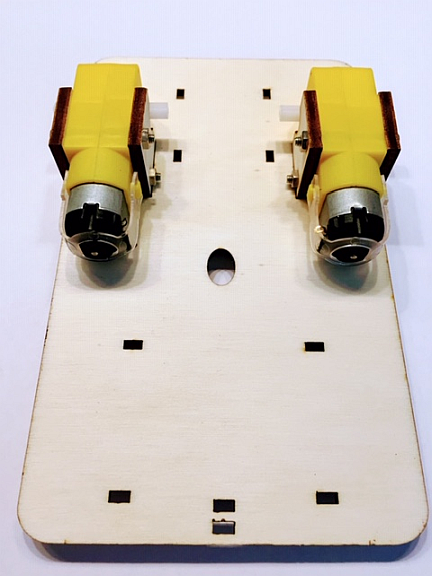
Schritt 1: Die Sperrholzplatte lasern
- Verwende die Lasercutter Vorlage

Schritt 2: Acht Platinenhalter drucken.
- Die Platinenhalter tragen den Calliope (10mmPIN) und die H-Brücke (4mmPIN). Sie werden auf die Bodenplatte geklebt.
- 3D-Druckvorlage

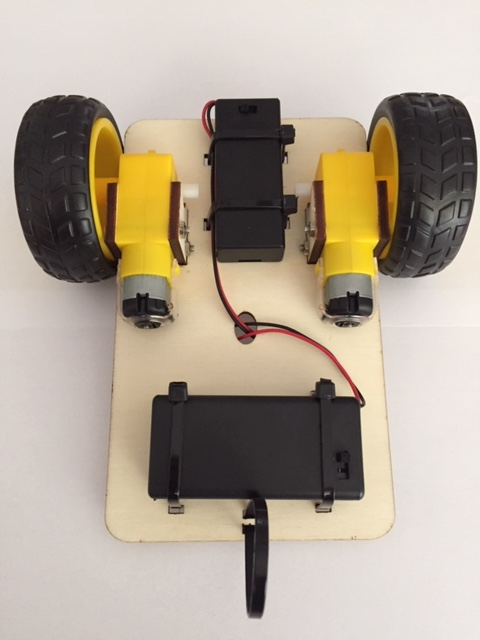
Schritt 3: Die zwei Getriebemotore auf die Bodenplatte montieren (M3x30).
- Die Lötanschlüsse zeigen nach innen.
Schritt 4: Die beiden Batteriehalter mit Kabelbinder auf der Bodenplatte befestigen.
- Der Kabelbinder vorne dient als Stütze und als "3. Rad".
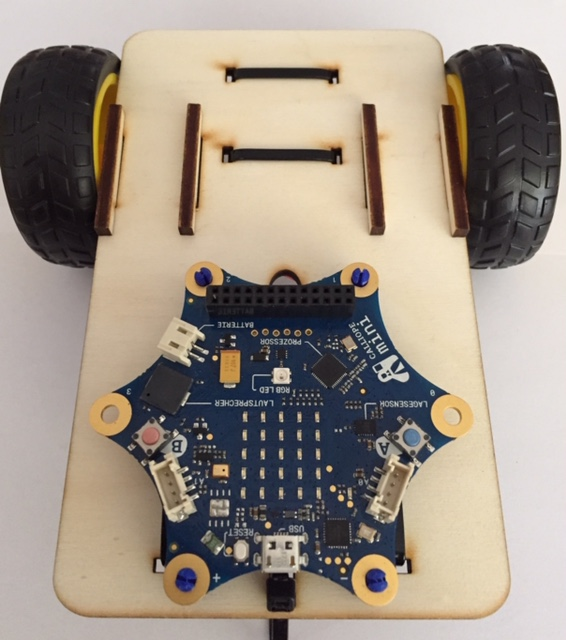
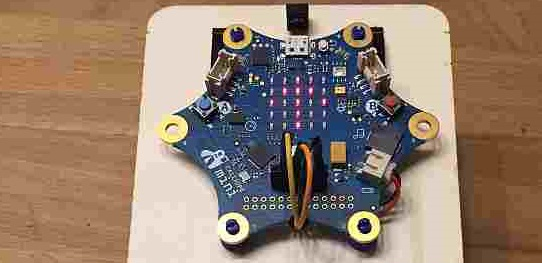
Schritt 5: Den Motor-Treiber L298N (4mmPIN) und den Calliope (10mmPIN) mit Platinenhalter auf die Bodenplatte montieren.
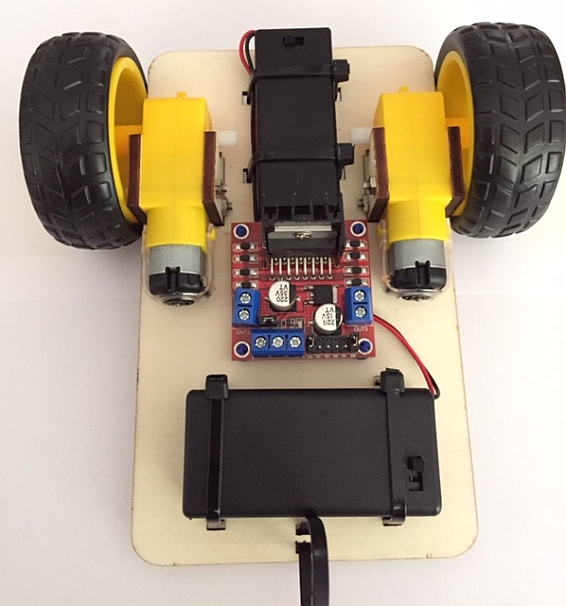
Schritt 6: Die beiden Getriebemotore mit der H-Brücke verdrahten.
- PIN 8 Motor links und PIN 10 Motor rechts.
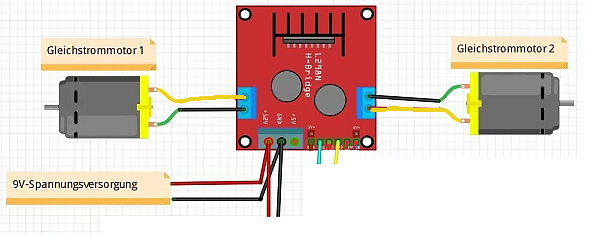
Schritt 7: Den Calliope mit der H-Brücke und der Batterie verdrahten.
- Grove A1: C16 = Motor links, C17 = Motor rechts und GND.
Schritt 8: Das Programm mit OpenRoberta in den CalliBot laden.
Schritt 9: Das Programm mit OpenRoberta in den Sender-Calliope laden.
Schritt 10: Funktionstest.
- Mit dem Sender-Calliope den CalliBot mit den Tasten A und B ansteuern.
- Taste A = CaliBot fährt nach links.
- Taste B = CaliBot fährt nach rechts.
- Taste A+B = CaliBot fährt geradeaus.
Fertig!
- Der CaliBot mit Fernbedienung.

