C++ ESP32 Servo Poti Steuerung
Mit diesem Programm werden drei Servo-Motore mit drei Potis angesteuert. Die Position der Servos wird in einem OLED-Display angezeigt. Das Programm ist der erste Schritt für die Konstruktion eines Roboter-Arms.
Hardware
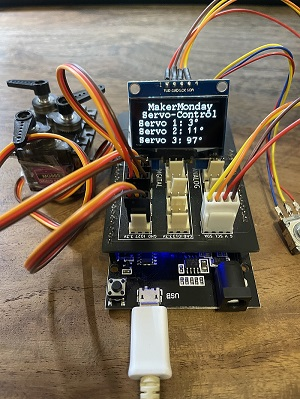
Die Hardware für die Servo-Steuerung
- 1 x ESP32 V1
- 3 x Servo Motor SG90
- 3 x Potis 10k
- 1 x OLED-Display 1,3"
- Kabel und JST-Stecker
Verdrahtung
Die Verdrahtung für die Servo-Steuerung
- Servo 1: GPIO27
- Servo 2: GPIO16
- Servo 3: GPIO17
- Poti 1: GPIO34
- Poti 2: GPIO36
- Poti 3: GPIO39
- Display: SDA-SCL-5V-GND
- I2C Verbindung am ESP32: GPIO21 (SDA) und GPIO22 (SCL)
Programm
C++ ESP32 Servo Poti Steuerung
Servo-Steuerung mit Display und Potis