MrBot
Diese Bauanleitung beschreibt einen tanzenden Bot. Jedes Bein hat zwei Gelenke die von Servo-Motoren bewegt werden. Als Steuerung dient ein Arduino NANO, gespeist von einer 9V-Batterie. Das Programm kann um eine Hindernis-Erkennung erweitert werden, da beim Bot auch ein Ultraschall-Sensor verbaut ist.
Die Bot-Elemente werden aus einer 2mm ABS-Platte und einer 2mm Sperrholzplatte (Füße) gelasert. Die Montage erfordert etwas Geschick.
Hardware
Die Stückliste für MrBot:
- 1 x ABS Platte DINA4 2mm
- 1 x Sperrholzplatte DINA4 2mm
- 4 x Platinenhalter (3D-Druck)
- 4 x Abstandshalter M3*25 Kunststoff
- 1 x Ardunio NANO
- 4 x MG996R Servo Motore
- 1 x HCSR04 Ultraschallsensor
- 1 x LM 2596S Spannungsregler 5V
- 1 x 9V Batterie mit Gehäuse
- Schrauben
- 10 x M1.5*5
- 6 x M1.4*8
- 12 x M2*8
- 18 x M3*5
- 8 x M3*8 Senkkopf
- Muttern
- 6 x M1.4
- 12 x M2
- 8 x M3 selbstsichernd
- 4 x Platinenfüße
Aufbau und Montage
Der Aufbau und die Montage von MrBot ist in mehrere Schritte unterteilt
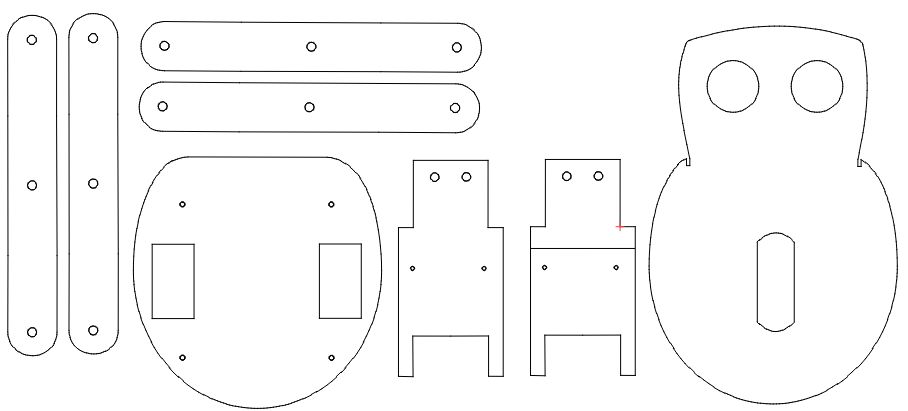
Schritt 1: Die ABS-Platte und die Sperrholzplatte lasern
- Verwende die Lasercutter Vorlage, bestehend aus:
- 2 x BeinV1.SVG (ABS)
- 1 x DeckplatteV1.SVG (ABS)
- 1 x GrundplatteV1.SVG (ABS)
- 2 x FerseV1.SVG (ABS)
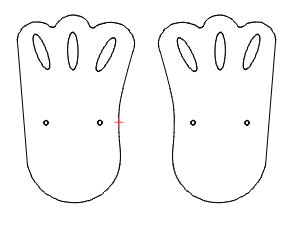
- 2 x FussV1.SVG (Sperrholz)
- Download Lasercutter FussV1.lbrn
- Download SVG-Dateien
Lasercutter-Datei (ABS)
Füße (Sperrholz)
Schritt 2: Vier Platinenhalter drucken.
- Die Platinenhalter tragen das Shield auf der Deckplatte (Schritt 6)
- 3D-Druckvorlage

Schritt 3: Die Schenkel der Fersen und der Füße biegen und auf angegebenen Durchmesser aufbohren.
- Füße: Beide Schenkel gleich lang, Innenmaß 37 mm

- Bohrungen:

- Ferse biegen, beide Schenkel gleich lang:

- Bohrungen: Für die 1,5mm Bohrungen des Servos, den Servo als Bohrschablone verwenden.

- Schritt 4: Die Schrittmotore auf die Grundplatte und an die Fersen montieren und verschrauben (alternativ kleben).
- Ferse und Schenkel verschrauben. Die Teile müssen beweglich bleiben, so dass der Schrittmotor den Schenkel bewegen kann.

- Die Füße an den Ferse montieren.

- Schritt 5: Den Ultraschallsensor an die Deckplatte montieren (alternativ kleben).

- Schritt 6: Den Arduino NANO mit dem Shield auf die Deckplatte montieren.
- Den NANO auf das Shield montieren.
- Den NANO mit dem Shield auf die Deckplatte montieren, dazu die Platinenhalter verwenden.

- Schritt 7: Den Batteriehalter an die Grundplatte montieren (alternativ kleben).

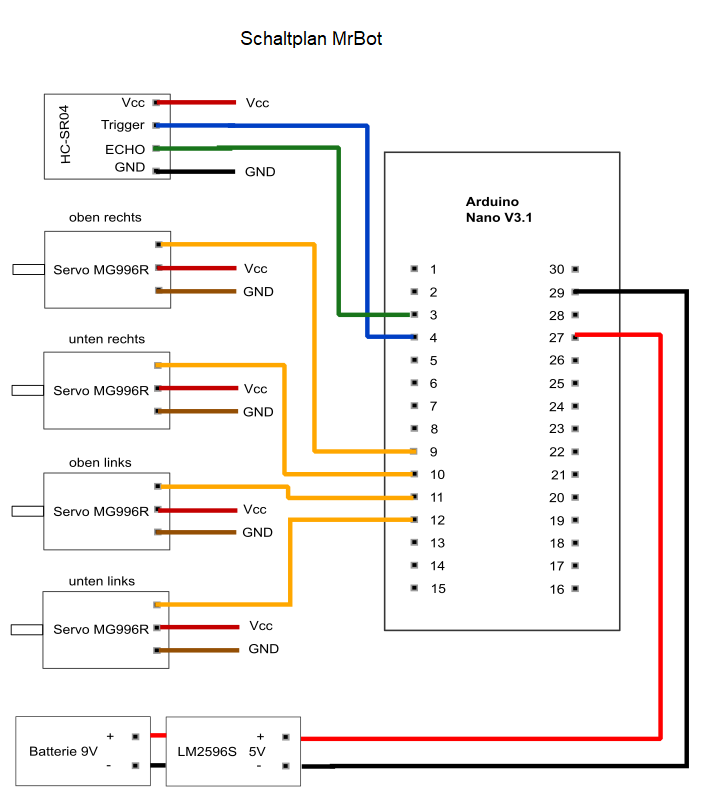
- Schritt 8: Die Schrittmotore, den Ultraschallsensor und den Batteriehalter nach Schaltplan verdrahten.
- Schritt 9: Das Programm in den Arduino NANO laden.
- Schritt 10: Funktionstest. MrBot tanzt.

- Fertig!
- Alternative Bauformen
