RoboCar
Diese Anleitung beschreibt ein, von einem WEB-Server gesteuertes Fahrzeug. Der Antrieb des RoboCar erfolgt über vier Getriebe-Motore, als Spannungversorgung dienen zwei Akkus. Das Herzstrück ist ein ESP32 NodeMCU. Die Träger-Elemente werden aus zwei 4mm ABS-Platten gelasert. Optional kann das RoboCar um eine Hindernis-Erkennung und eine IR-Fernsteuerung erweitert werden. Die Montage eines Servos, eines Ultraschall-Sensors und eines IR-Empfängers ist vorgesehen.
Wird kein Ultraschallsensor oder IR-Empfänger montiert, reicht eine Bodenplatte für die Montage der Bauteile aus. Für die Bodenplatte kann auch eine 4mm Sperrholzplatte verwendet werden.
Hardware
Die Stückliste für das RoboCar:
- 2 x ABS Platte DINA4 4mm oder
- 1 x Sperrholzplatte DINA4 4mm
- 1 x ESP32 NodeMCU
- 8 x Platinenhalter (3D-Druck)
- 4 x Getriebemotore mit Räder
- 1 x Dual-H-Brücke-DC-Motorantrieb L298N
- 2 x 18650 Akkus mit Akkucase
- 6 x Abstandshalter 40mm, M3
- 4 x MDF Quader (Halterung für die Getriebemotore)
- 1 x Lochrasterplatine (Träger für den ESP)
- 1 x Ultraschallmodul HC-SR04 (optional)
- 1 x IR-Empfänger mit Fernbedienung (optional)
- Kleinmaterial, Schrauben, Muttern, Klemmen, Platinenstecker, Schaltdraht
Aufbau und Montage
Der Aufbau und die Montage des RoboCar ist in mehrere Schritte unterteilt.
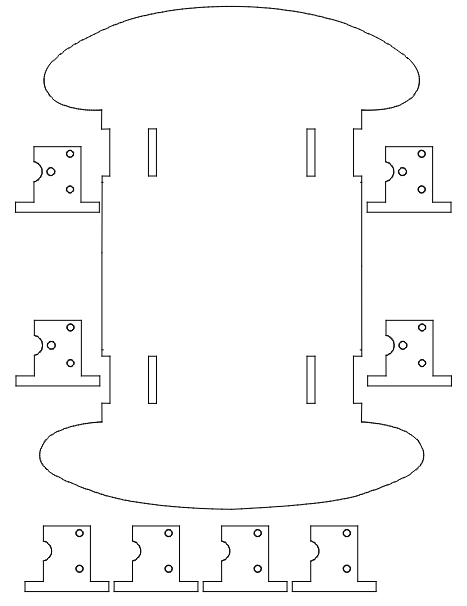
Schritt 1: Die ABS-Platten lasern (alternativ eine Sperrholzplatte)
- Verwende die Lasercutter Vorlage, bestehend aus:
- 1 x Deckplatte.SVG (ABS)
- 1 x Bodenplatte.SVG (ABS)
- oder
- 1 x 4mm Sperrholzplatte (Lasercutter Vorlage)
Schritt 2: Acht Platinenhalter drucken.
- Die Platinenhalter tragen den ESP32 und die H-Brücke. Sie werden auf die Bodenplatte geklebt.
- 3D-Druckvorlage

Schritt 3: Je sechs Löcher D=4mm für die M3 Abstandshalter in die Deck- und Bodenplatte bohren.
- Deck- und Bodenplatte beim Bohren übereinander legen.

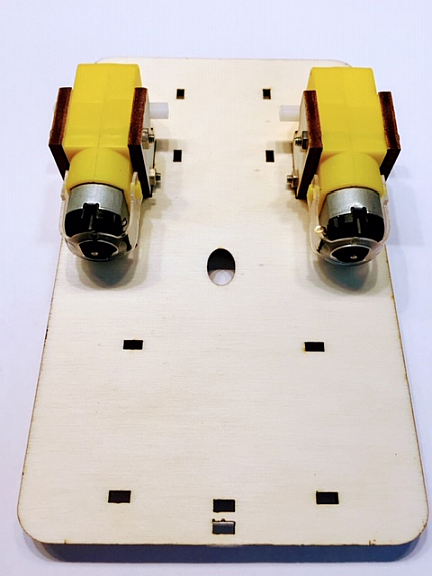
Schritt 4: Die vier Getriebemotore mit MDF-Quader auf die Bodenplatte montieren (M3x10).
- Auf die genaue Flucht der Achsen achten, damit die Räder im gleichen Abstand zum Boden und in der Flucht montiert sind!
Alternative Variante für die Motorhalterung auf einer 4mm Sperrholzplatte.
Wird der Ultraschallsensor und der IR-Empfänger nicht montiert, reicht eine einfache Bodenplatte aus.
Die Bauteile werden bei beiden Varianten identisch auf die Bodenplatte montiert.
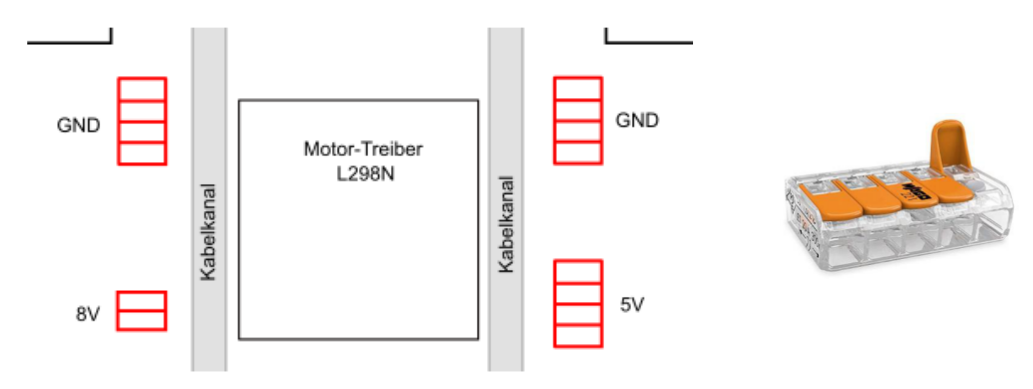
Schritt 5: Den Motor-Treiber L298N und den ESP32 mit Platinenhalter auf die Bodenplatte montieren.
- Der ESP32 wird auf eine Lochraster-Platine mit Steckverbinder montiert.
- Die Anschlüsse zum ESP32 mit Platinenstecker verdrahten.
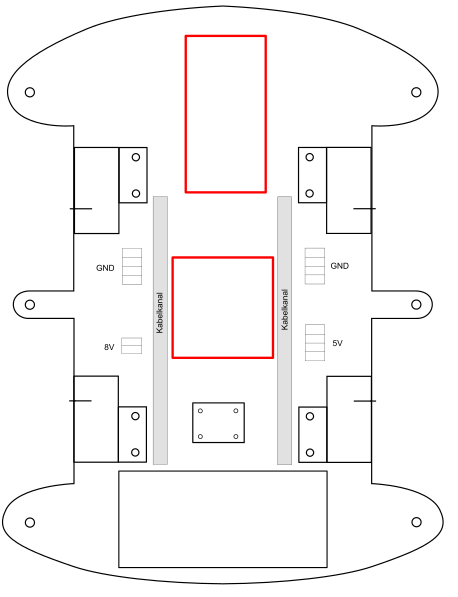
Schritt 6: Die Akku-Box im hinteren Teil auf die Bodenplatte montieren (M3x10).
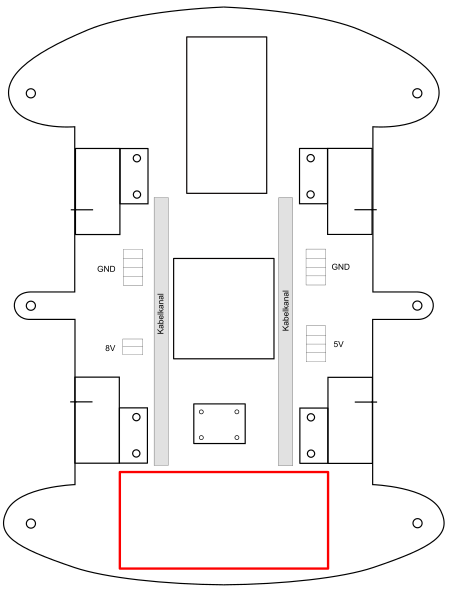
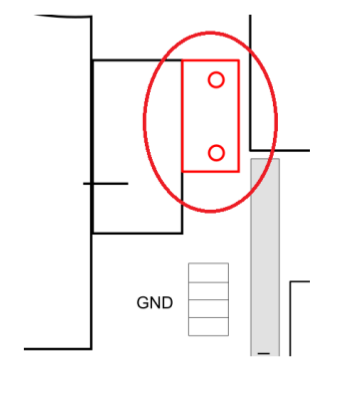
Schritt 7: Für die Verdrahtung der Bauelemente die Klemmen (WAGO-Verbindungsklemmen) auf die Bodenplatte kleben.
Schritt 8: Die Bauelemente nach Schaltplan verdrahten.

Schritt 9: Das Programm in den ESP32 laden.
Schritt 10: Erster Funktionstest.
- Mit dem Seriellen Monitor der Arduino IDE die IP-Adresse des WEB-Servers auslesen und im Browser den WEB-Server aufrufen.
Schritt 11: War der Funktionstest erfolgreich, wird die Bodenplatte und die Deckplatte mit 40mm Abstandshalter miteinander verbunden.

Schritt 12: Die Räder auf die Getriebemotore stecken und verschrauben.
Schritt 13: Zweiter Funktionstest.
- Mit dem Seriellen Monitor der Arduino IDE die IP-Adresse des WEB-Servers auslesen und im Browser den WEB-Server aufrufen.

Fertig!
- Dieses RoboCar ist mit einen Solar-Panel für die Akku-Ladung ausgestattet,
sowie einen Servomotor zur Steuerung der Hinderniserkennung (Ultraschallsensor) und einen IR-Empfänger.
